Bir Bulanık Denetleyici ile Hekzapod Mobil Robot Uygulaması
 Bulanık mantık denetleyicileri ile bir hekzapod (6 bacaklı) mobil robot uygulaması
Bulanık mantık denetleyicileri ile bir hekzapod (6 bacaklı) mobil robot uygulaması
Merhaba değerli Antrak Gazetesi okurları.. Bu yazımızda size, incelemiş olduğum bir makaleden sözetmek istiyorum.. Makalede bulanık mantık denetleyicileri ile bir hekzapod (6 bacaklı) mobil robot uygulaması geliştirilmiş.. Yazarları Makoto Kern ve Peng-Yung Woo .. 2005 tarihinde Northern Illinois Üniversitesi (USA) Elekrik Mühendisliği Bölümünde kabul edilmiş.. Makalenin orjinalini aşağıdaki linkten edinebilirsiniz :
Implementation of a hexapod mobile robot with a fuzzy controller
Makalede MKIII isimli bir hekzapod mobil robotun, alıcılarından gelen girdileri, bulanık kurallar tabanı ile oluşturulmuş bulanık denetleyiciler yardımı ile çevresindeki engellere çarpmadan hareket edebilme yeteneğine dönüştürmesi çalışması sunuluyor. Mobil robotun ana görevleri olan algılama, muhakeme ve hareket yetenekleri ele alınıyor. Düşük maliyetli bir tasarım yapabilmek de hedefler arasında…
Aşağıda, makalenin başrolündeki robotun değişik cepheden resimlerini görmektesiniz J

Geliştirilmeye devam eden bu tip robotlar, gerçek dünyanın dinamikleri ile mücadele edebilen fiziksel nesnelerdir. 1990'lı yıllarda, çeşitli laboratuvarlarda incelenen böceklerin hareketlerinden esinlenerek ortaya çıkmış ve temelde tekerlekli ve bacaklı olarak 2 kategoride inceleniyorlar..
Bu tip mobil sistemlerin davranışları hakkında ilgilenilmesi gereken ana durumlar, yanılma tahminleri, çevredeki nesneleri tanıma ve bunlara karşı gerçek zamanlı olarak yanıt verebilme yetenekleri, tüm bu unsurların uyum içinde sergilenmesi vb. dir…
MKIII isimli robotun, bilinmeyen, daha önceden planlanmamış bir ortamda hareket edebilmesi de varılmak istenen önemli hedefdir. Yabancı olmayan ortamlarda robot hareketlerini kontrol etmek çok daha kolaydır..
Yazımınızın bundan sonraki bölümünde birkaç teknik noktaya değinelim.. Bulanık mantık denetleyicilerinin kullanımını bir sonraki yazımıza bırakalım.. Bulanık mantık ile ilgili birkaç bilgi de vererek makaledeki yerine değiniriz..
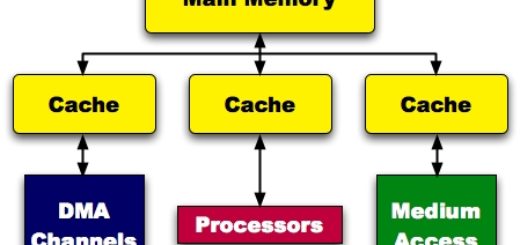
Robotun denetleyicisi grafiği ve dijital kamerayı destekleyen 35 Mhz, 32 Bit anakarta sahiptir. Robotun beyni olan bu anakart'a bağlı olan donanımlar :
- Kamera
- LCD Ekran (64*128 pixels)
- Güç Kaynağı (7V-9V)
- Mikrofon
- Seri konektör
- DC Motor ve kodlayıcı (mesafe tesbiti için)
- Servo bağlantılar (12 ad.)
- Kızılötesi konektörler (6 ad.)
- Hoparlör bağlantısı (2 ad.)
- Genişleme bağlantıları (3 ad.) (yön algılama kapasitelerini arttırmak için)
- Kablosuz bağlantı (diğer robotlar ve PC ile haberleşmek için)
- Background debugger (denetleyicideki güncellemeler için )
MKIII, birçok farklı cinste ve sayıda bacaklı hayvan yürüyüşlerinin dinamik ve denge unsurlarının incelenmesi sonucunda tasarlanmıştır. İnsan yürüyüşü hareketlerinin dinamik dengelerinin, böceklere göre daha karmaşık olduğuna makaledeki değinilmektedir.

Robotun bacak hareketlerinin şekli, servomotor ve mesafe algılayıcılar hakkında teknik bilgiler makalenin 2. bölümünde açıklanıyor..
Nesnelerin yerini ve büyüklüğünü tesbit eden algılayıcılar aşağıdaki eşitsizliklere göre modellenmiş;

Burada y algılayıcının bulduğu nesne uzaklıkları, x ise nesnelerin gerçek uzaklıklarıdır. Y değeri 8 bit uzunluğundadır.
Uzaklık sensörleri, ortamdaki ışık miktarına, cisimlerin rengine, parlaklıklarına göre hatalı ölçümler yapabiliyor. Renk koyulaştıkça, parlaklık arttıkça cisimler daha uzak algılanabiliyor.

Yukarıdaki grafikte gri yüzeyin yansıması daha düşük olduğundan bunların uzaklığı, beyaz yüzeylere göre daha düşük (yani daha yakın) olarak ölçülmüş…
Çıktıların normalleştirilmesinde bu olasılıklar, HDT Yazılımı sayesinde elimine ediliyor. Girdilerin bulanık algoritma üyelik fonksiyonları değerleri tablosu da bu olasılıklar göz önünde tutularak hazırlanıyor.
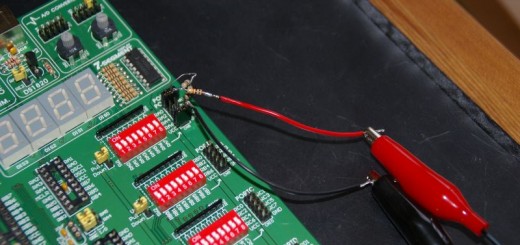
Aşağıdaki fotoğrafta bir örneği görüldüğü gibi değişik renk ve çeşitteki nesneler farklı noktalara konarak, algılayıcılar test ediliyor. Bu nesnelerin açıları ve yerleri değiştirilerek teste devam ediliyor…
Bir sonraki yazımızda, bulanık mantık denetleyicilerinin bu uygulamada nasıl kullanıldığından bahsedeceğiz.. Yeniden görüşmek dileğiyle; güzel, aydınlık günler..
Dilek KILIÇ
Bilgi Teknolojileri ve Eğitim Derneği