Quadrotor – Uçan PIC – 2
![]()
 Geçen ay tanıtılan uçan platformun bu defa uçus mekaniğini ve stabilitesini sağlayan PID (Doğrusal integrasyon ve türev) kapalı devre kontrol tekniğini ve parametrelerini buradan okuyabilirsiniz.
Geçen ay tanıtılan uçan platformun bu defa uçus mekaniğini ve stabilitesini sağlayan PID (Doğrusal integrasyon ve türev) kapalı devre kontrol tekniğini ve parametrelerini buradan okuyabilirsiniz.
Geçen ay sizlere PIC kullanarak yaptığım uçan platformu tanıtmış ve biraz teknik bilgi vermiştim. Bu yazı dizisinin ikincisinde aerodinamik yapısı sadece 4 adet pervaneden olusan bu garip uçan aletin uçus mekaniğini ve stabilitesini sağlayan PID (Proportional Integration and Differentiation-Doğrusal integrasyon ve türev)kapalı devre kontrol tekniğini ve parametrelerini anlatmaya çalısacağım.
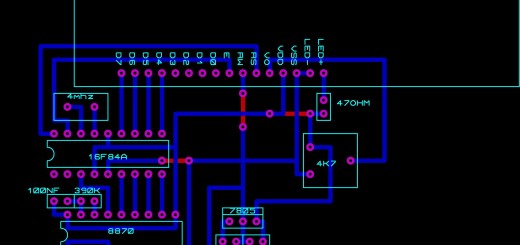
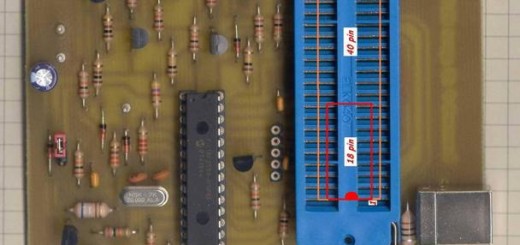
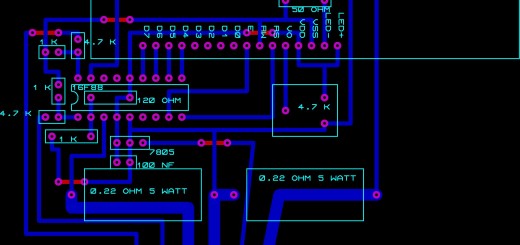
Gelecek ayki bölümde ise elektronik devreyi inceleyeceğiz.
Quadrotor ana yapı olarak dört adet motoru ve pervanesi bir “+” şeklinde yapılanmış bu “+”nin ortasında da kumanda ve elektronik stabilite devrelerinin yer aldığı basit bir yapıya sahiptir. Iki adet karşılıklı motor çifti diğer çifte göre ters yönde dönerek orta eksende oluşan tork yani dönme etkisini yok ederler.Böylece normal bir helikopterde bulunan tork etkisini gideren kuyruk pervanesine burada ihtiyaç olmaz.
Uzaktan kumanda sistemi herhangi bir dört kanallı Uzaktan kumandalı model uçak kumandası olabilir.

Resimde gorüldüğü gibi “+” yapısı ve dört adet rotor ekseniyle quadrotor iki joystickli kumanda ile kumanda edilmektedir. Eğer joystickler orta konumda kalırsa bütün motorlar eşit hızda döndüğü icin platform havada asılı kalır.
Soldaki joystick yukarı itildiğinde motorların devri eşit olarak artar ve quadrotor yükselir,aşağı itildiğinde ise motor devri azalarak quadrotor alçalır.

Quadrotoru sola veya sağa döndürmek için sağdaki joystick sola yatırıldığında sol pervane yavaşlar ve sağ pervane hız kazanır dolayısıyla platform sola kaymaya başlar,joystick sağa yatırılırsa bunun aksi gerçekleşir ve sağ motor yavaşlarken sol motor hızlanır ve platform sağa kaymaya başlar.

Öne veya arkaya manevra yapmak için ise sağdaki joystick ileri itilir veya geri çekilir.Ileri itildiginde ön motor yavaşlar ve arka motor hızlanır böylece platform öne devrilir veya kayar.Geri gitmek icin ise bunun tam tersi olur ve joystick geri çekilir, arka motor hızlanır ön motor yavaşlar.
Böylece platform sağa sola,öne arkaya yönlendirilip hızı ile oynanarak aşağı yukarı konrol edebilmekte.Peki yönünü nasıl kontrol edebiliriz?Yani ön dediğimiz motorun sağa veya sola dönmesi nasıl olacak?

Bu da soldaki joystick’in sağa ve sola hareket ettirilmesiyle sol ve sağda bulunan motorların her ikisinin hızlarını aynı anda ön ve arkada bulunan motorlara göre azaltmasıyla ve arttırmasıyla olur. Böylece orta eksende olusan Tork momenti dengesi bozularak platformun sağa veya sola dönmesi sağlanır.
Quadrotor konfigurasyon 
"Buraya kadar herşey gayet güzel de peki şekildeki roll, pitch ve yaw gyrolarına neden ihtiyaç var" diye soracaksınız.
Fizik ve kimyanın meşhur koşulu ideal şartlar altında bu gyrolara yani stabilite düzeltmesine gerek kalmadan quadrotor uçabilir.Nedir bu ideal şartlar?Motorlar ve pervaneler tıpatıp aynı özellikte olmalı,her iki eksenin uzunluğu ve birbirine olan açısı aynı olmalı,keza ağırlık dağılımı eşit olmalı vs. dış ortam etkileri,rüzgar olmamalı ki bunlar dengeyi ve uçuşu olumsuz etkilemektedir. Bu kadar şartı biraraya getirmek pratikte imkansiz olacağından bu hataları kontrol altına alıp elimine etmeye çalısmak daha mantıklı bir çözüm.
Bu noktada jiroskoplar ve PID devreye girmekte. Jiroskop, (İngilizce: Gyroscope, Gyro) veya Yalpalık, Cayroskop, Cayro, yön ölçümü veya ayarlamasında kullanılan, açısal dengenin korunması ilkesiyle çalışan bir alet. Jiroskopik hareketin temeli fizik kurallarına ve merkezkaç ilkesine dayalıdır.Wikipedia böyle der.Daha fazla bilgi için google en iyi dostunuz.
Uçan platformda kullandığım jiroskoplar tamamen entegre MEMS(Micro Electro Mechanical Systems) yani mikro mekanik sistemler teknolojisinde üretilmiş entegre devre içine gömülmüş mekanik jiroskoplar.
Quadrotordaki amacı üç hareket ekseni olan yana yatma (ROLL),devrilme(PITCH) ve dönme (YAW) eksenlerindeki açısal değişimleri ölçmek ve PIC mikroişlemciye iletmek.
PIC jiroskoplardan gelen açı bilgilerine göre hangi eksenin ne kadar devrildiğini bilmekte ve hatayı düzeltmek için gerekli motorun gücünü azaltıp artırmaktadir.Jiroskoplar mutlak açıdan ziyade açısal hızı ölçmektedirler.Asıl sorun hata miktarını ölçtükten sonra bu hatayı düzeltmek için gerekli miktarı yani hızı arttırılacak motorun ne kadar hızlanacağını hesaplamak.Tabii bu arada hızını arttırdığınız motorun karşı istikametindeki motorun hızınıda o oranda yavaslatarak toplam kaldırma gücünü eşitlemeniz lazim.
PID(Proportional Integration and Differentiation) bu noktada devreye girer.PID kontrol endustriyel ve teknik dünyada sıkça kullanılan bir kapalı devre hata düzeltme ve kontrol tekniğidir.PID Kontrol işlemcisinin matematiksel modeli şu şekildedir.

(PID kontrol matematiği hakkında daha fazla bilgi almak için google en iyi dostunuz.)
Algılayıcı girişleri – (ki bizim platformumuzda jiroskoplar) – sürekli olarak taranarak giriş kumanda komutlarıyla – (bu bizim plaformda pilotun kumanda komutları) – kıyaslanır ve delta yani fark değeri üretilir.Bu değer istenenden sapma miktarını hesaplamak için kullanılır.Daha sonra bu spama, aktörlerin (actors) yani motor devirlerinin sapma sonucunda oluşan hatayı düzeltme miktarını hesaplamak için işe yarar. Yukarıdaki şekilden de görüleceği gibi PID, girişindeki hataya karşi hesaplanacak düzeltme değerini üç adet matematiksel döngü işleminden sonra elde eder.Bunlar, Proportional yani doğrusal,Entegre yani Iintegration ve Türev yani differential işlemlerdir.Her işlemin kendine ait bir düzeltme katsayısı vardır ve bunlar parametre olarak adlandırılır.Bu parametreler her kontrol edilen sistem için, sistemler aynı ozellikte ve yapıda olsa bile ufak farklılıklar gösterir ve bu parametreler ile oynanarak PID sonundaki hata düzeltmenin osilasyonlardan arınmış yumuşak geçişli olması sağlanır.
Bu işlemlerin her biri hata üzerinde birbirinden farklı düzeltici etki gösterir.Şimdi bunlar hata üzerinde ne gibi etki yaparlar beraberce inceleyelim.
Proportional yani doğrusal kısım:
Bu kısım kumanda komutlarının ve gyrolarin motor devri üzerine direkt etkisini hesaplar.Yüksek bir değer hataya karşı sert bir cevap olur ve stabilite düzeltmesi sert olur.Belirli bir değerin üzerinde sistem osilasyona başlar.Düşük bir değer ise hataya karşı reaksiyonu geciktirir bu da stabil uçuşu zorlaştırır.
Integral yada Entegre kısım:
Bu kısım hataların toplamını hesaplar,bizim platformda bu gyroların ölçtüğü mutlak açı değerlerinin toplamıdır.Bu değerin en büyük iyiliği veya etkisi kumanda kontrol bilgisi gelmeyen yani pilotun kumanda ile hatayi düzeltme çabası olmadığı durumda platformun stabilitesini düzelterek programda belirlenen yatay konuma getirmesidir.
Differential yada Diferansiyel kısım:
Diferansiyel hatayı gidermek için açı değişiminin hangi hızda olması gerektiğini hesaplar.
Bu kısım bir nevi amortisör gibi davranır.İntegral kısmın hata düzeltmek için girdiği çabayı yumaşatarak düzeltme işleminin daha yumuşak geçişli olmasini sağlar.Bu en onemli katsayıdır. Quadrotor üzerindeki motorlar 8000-10000 rpm yani devirde dönmekte ve istenmesede vibrasyonları sistem üzerinde salınarak jiroskoplarin açıları üzerine etkili olmaktadır.Bu kısım bu küçük salınımların hesaplamalarda düzeltme sonucunu etkilemesini yumuşatır.
Bu tip olumsuz vibrasyonlardan kurtulmak için kullandığım bir başka teknikte Kalman dijital filtre tekniği. Bu teknikle PID’e girmeden vibrasyonların belirli bir noktadan ötesi programda fıltrelerendiği için uçuşun daha stabil ve sarsıntısız olmasını sağlar.Amaç bir vdeo platformu yapmak olduğu için vibrasyonsuz stabil uçuş en önemli faktördür.
PID hesaplamalarında diğer bir onemli noktada PID parametre grafiğidir.Bu grafik hata ile düzeltme miktarlarının (geri besleme) kesiştiği grafiktir.İki noktada grafik parametre değerleri kesişir. Bu iki geri besleme noktası optimum kontrol için gerekli parametrelerin kesiştiği noktadır. Bunların birisi “pozitif” geri besleme diğeri ise “negatif” geri besleme noktasıdır.
Pozitif geri besleme noktası, küçük bir doğrusal yani proportional değerin ve diferansiyel değerin de aynı işaretli olması durumudur ki bu çok sert düzeltmeler sonucu osilasyona sebep olmakta ve ilk başta uçmak rahat olsada daha sonra sistem osilasyona girmekte ve kontrol kaybolmakta.Özellikle rüzgar gibi dış etkilerde.Bu durumu deneme videolarinda gorebilirsiniz.
Negatif Geri Besleme noktası, göreceli olarak daha büyük bir doğrusal yani proportional ve diferansiyel değerlerin birbirine ters işaretli olması durumudur.Ters işaretli diferansiyel değer osilasyonların ve vibrasyonların daha kolay düzeltilmesine yardımcı olur.Bu da daha pürüzsüz bir uçus ve stabilite demektir.Son iki ucus videosu negatif geri besleme kullanılan uçuşlardır.Göreceğiniz gibi uçuş cok daha stabil ve kontrollu.
Başarılar…
Barbaros
Aşağıdaki linklerden denemeler sırasında çekilen videoları izleyebilirsiniz.