Quadrotor – Uçan PIC – 3
![]()
 Uçan Pic’in daha önceki iki bölümünde Platformun genel yapısını ve stabil ucmayi saglayan PID uçuş mekaniğini anlatmıştım. Bu bölümde ise Uçuş platformunun devresine detaylı bir şekilde göz atacağız.
Uçan Pic’in daha önceki iki bölümünde Platformun genel yapısını ve stabil ucmayi saglayan PID uçuş mekaniğini anlatmıştım. Bu bölümde ise Uçuş platformunun devresine detaylı bir şekilde göz atacağız.
Değerli Antrak Gazetesi okurları,geçen ay tatilde olduğum için üç yazılık yazı dizimin son bölümünü bu aya erteledim,sizlerden özür dilerim.
Uçan Pic'in daha önceki iki bölümünde Platformun genel yapısını ve stabil ucmayi saglayan PID uçuş mekaniğini anlatmıştım. Bu bölümde ise Uçuş platformunun devresine detaylı bir şekilde göz atacağız
Quadrotor'un devre şeması fazla karışık görünmesede elektronik teknolojisi anlaminda bir çok yeni eleman ve bir mikroişlemci içeriyor.
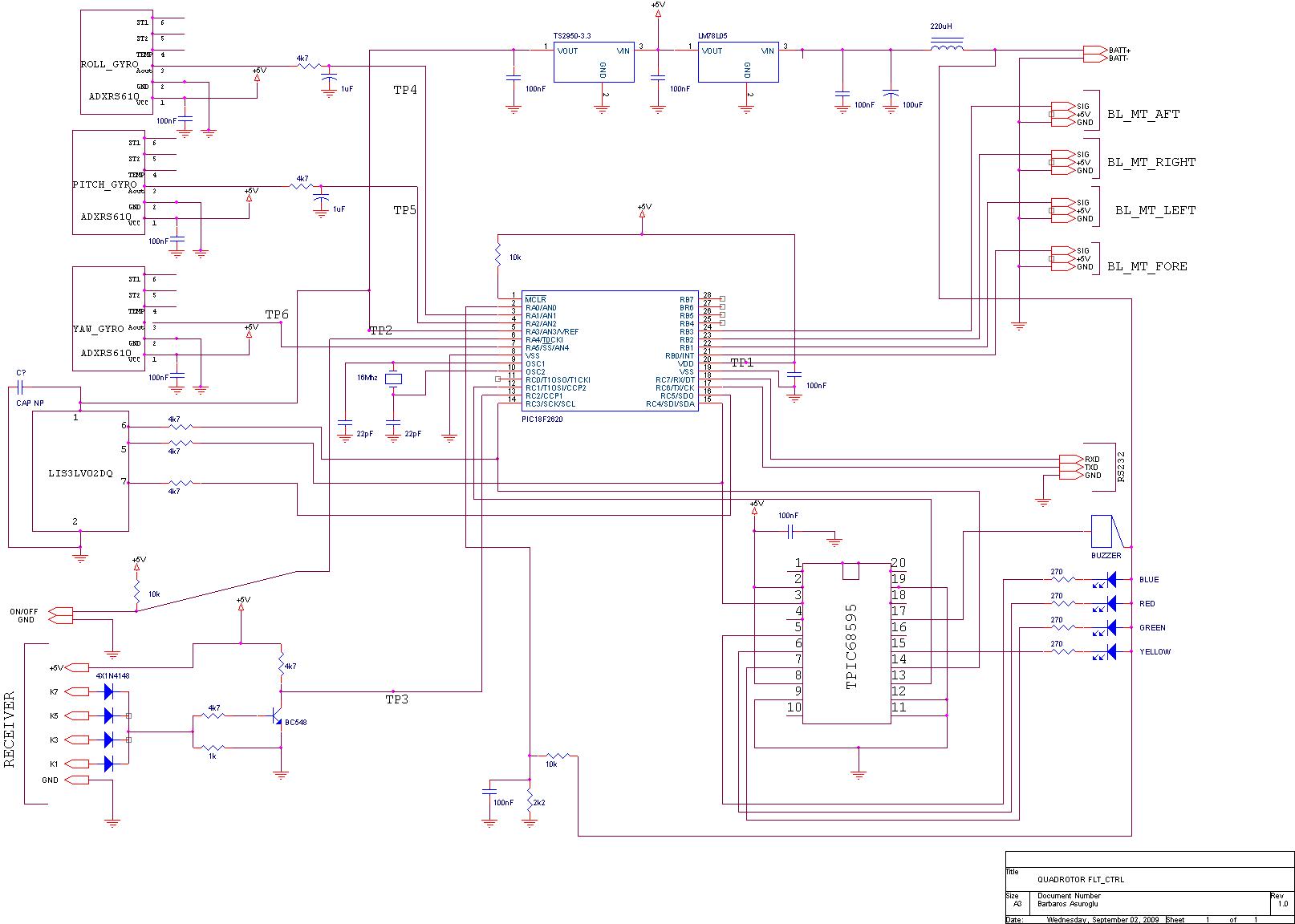
Böyle bir devreyi bundan beş yıl önce bu kadar az elemanla ve bu kadar küçük gerçekleştirmek oldukça zor olurdu.Bunun en onemli sebebi elektronik MEMS( Micro Electro Mechanical Systems-Mikro Elektro Mekanik Sistemler) jiroskoplarin ve ivme ölçerlerin çok yeni bir teknoloji oluşu ve fiyatlarının o yıllarda astronomik olması.
Stabil uçmayı sağlayan elektronik devre esasen bir otopilot sisteminden cok da farklı değil.
Ana elemanları:
1 adet PIC mikroişlemci
3 adet MEMS ADXRS 610 jiroskop
1 adet LIS3LV02DQ 3 eksenli digital MEMS ivme ölçer
1 adet led sürücü
1 adet 6 kanallı standart PPM uzaktan kumanda alıcısı.
Bunlara ek olarak filtre ve voltaj stabilizasyonu amacıyla kullanılmiş kondansatör ve dirençler. Devrenin kalbi PIC18F2620 işlemcisidir. Bu işlemci ve MEMS elemanlar hakkında bilgi edinmek için yazı sonundaki datasheet'leri inceleyebilirsiniz.
Devre şemasında görülmeyen ama en az MEMS elemanlar kadar önemli bir yeri olan ESC(Electronic Speed Controller-Elektronik hız kumandası)'leride unutmamak gerek. ESC'lerin gorevi,her bir firçasız motoru girişindeki kumanda darbesine göre sürmek,yani hızını kontrol etmektir.
PIC işlemcinin ana görevi MEMS jiroskoplardan ve ivme ölçerden gelen verileri kumanda bilgileri ile kıyaslayarak PID denklemlerine göre en uygun çıkışı motorlara iletmek.
ADXRS610 jiroskoplari belirli bir açıdan ziyade açisal değişimi 0-5 Volt arası açısal voltaja dönüştürür.Bunun anlamı şudur,eğer siz sabit bir açıda duran jiroskopu ekseninde eğmeye başlarsanız açısal değişim yani sabit açınızdan ne kadar saptığınızın oranı analog olarak iletilir. Böylece PIC bir eksendeki hareketi algılar ve harekete karşı hareketi ve oranını hesaplar. Fakat bu sizin yere paralel mi yoksa belirli bir açıyla mı sabit durumda kaldığınızı anlamaya yetmez.yani yer cekimi ivmesine refere değildir.
Bu durumda sadece açısal değişim oranı platformu düzeltmeye yetmez buna ek olarak bir de yerçekimi ivmesine baglı düzeltilen açısal hareketin aslında yere paralel olup olmadığını kontrol etmek gerekir.Bunu sağlayanda MEMS ivme ölçerdir.Bu iki algılayıcı beraber çalışarak platformun üç boyutlu uzayda sabit yani dört kolundan her biri kontrol komutları dışında açısal hareket yapmadan ve yere paralel bir konumda kalmasını sağlar,Tabii bu PIC programı ve PID denklemleri sayesinde olur.
PIC'in bu ana gorevi dışında ek birkaç görevi daha vardır.Batarya voltajını gözleyerek belirlenen batarya seviyesine gelince bir buzzer sesiyle pilota bataryanın bitme noktasına geldiğini ve inmesi gerektiğini işaret etmek.Bu çok önemli zira Quadrotor bir uçak gibi aerodinamik olarak süzülerek uçmaz.Bir helikopter gibi otojirasyon ozelliği de yoktur.yani motorlar durunca mekanik bir süzülme,güç olmadan uçus mümkün değildir.Uçus motorlar çalıştığı ve gücünüz olduğu sürece mümkündür.Bu durumda bataryanız bitmeden güvenli bir iniş yapmanız bir sonraki uçuş için sistemin sağlıgını garanti eder.Eger pil biterse yada motorlar durursa yer çekimi devreye girer ve taş gibi düşer!
PIC'in diğer gorevi PPM dediğimiz kumanda sinyallerini anlayarak PID denklemine uygun yerlere bu sinyalleri ekleyerek uçus kumandasına olanak sağlamaktır.
Tasarım da karşılaştığım zorluklar ve gelecekte eklemeyi düşündüklerim:
Bu proje gerçekten zor ve uzun soluklu bir proje.Özellikle işiniz elektronik değilse ve hayatınızı başka bir meslekten kazanıyorsanız, bir de aile yaşamınız varsa o zaman bayağı uzun soluklu bir proje oluyor. Ben ilk fikirden bu zamana kadar 9 aydır yaklaşık bu projeyle ugraşıyorum ve ilk program denemeleri ile size sunduğum stabil uçuş videosu arasında havlu atmayı düşündüğüm o kadar çok zaman oldu ki.Şimdi ucuşlarin stabilliğini gördükçe tadını çıkarıyorum ve gerçekten değdiğine inanıyorum,
Tasarımın en zor tarafı ne program ne mekanik veya elektronik yapı,PID katsayi ayarları işin en zor kısmı.Her mekanik uçuş yapısı kendine özgü bir parametre ayarını gerektiriyor ve ana 12 adet,minik minik de 24 adet parametre ile uğraştığınızı düşünürseniz bunların hepsini deneme yanılma yoluyla uçus yaparak ayarlayıp en uygun parametre kombinasyonu ile en stabil uçusu sağlamak işin en zor tarafı. Şu ana kadar iki adet motor,12 çift pervane,bir adet mekanik gövde kırdığım düşünülürse sanırım daha iyi bir fikir verir.
Daha ne yapmak istiyoruma gelince,birincisi uçustan elde ettigim tecrübeler ile kendime bir parametre zarfı yaratıp yeni bir platformda programın ilk parametreleri kendisinin seçmesini sağlamak ve sadece ince ayarlar ile yetinme yeteneğini kazandırmak programa. Bunu yapmak aslında söylemekten daha zor.Çok sayıda uçuş ve deneme yapmak gerekiyor.
Bundan sonrada bir elektronik pusula,barometre ve GPS ekleyerek uçuşu yarı otomatik hale getirmek. Amaç havada asılı kalıp video çekmek olunca.belirli bir yönde,yükseklikte ve rüzgar ötelemelerinden etkilenmeden asılı kalmak ve onun öylece kaldığını görmek çok zevkli olacak.
Ekteki fotoğraflar da halen uçan karbon fiber yapımı quadrotoru v GPS ile diğer ekleri barındıracak halen yapım halinde olan 75 cm kol açıklıklı büyük quad'ı görebilirsiniz.


Quadrotorda kullanılan MEMS mödüllerin ve PIC işlemcilerin datasheet'leri:
Başarılar…
Barbaros