Step Motor Kontrol
 | Öğrenci arkadaşların, step motor konusunda zorlandıkları kısımları demo video da dahil olmak üzere anlatımı |
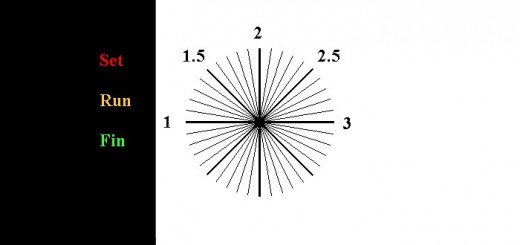
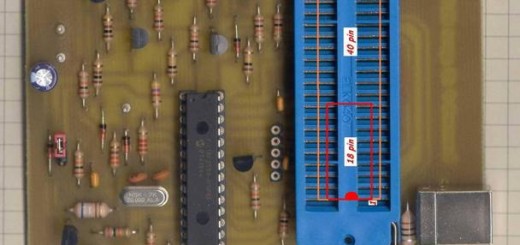
Bilindiği gibi step motorlar dönen bir mıknatıs ve de mıknatısın(rotorun) dönmesi için PIC'in sıra ile ters kutupta enerjilendiği bobinlerden meydana gelir. ISIS çiziminde ve demo videoda görüleceği üzere bobinlerin enerjilenme sırasına dikkat edilirse mıknatısın daima ters kutuplar arasıda kaldığı ve de çok stabil bir şekilde durduğu görülür. ISIS devresinde ADIMTABLO da dikkat edilirse birinci pozisyonda X-Y 0-0 olduğundan N kutup iki nokta (X-Y)nin arasında kalır (0011) durumu. Bir sonraki adım olan 1-0-0-1 ise Y ve X' negatif olacağından ve diğer uçlarda ters kutup olacağından mıknatıs dönme ile ikinci pozisyona geçer.1-0-0-1 durumu. Bobinlerin bu şekilde enerjilendirmesi motora maksimum tork sağlar. Bir adımı 7,5 derece olan motorlarda tam bir tur için 360/7,5=48 adım yapar. Yani adım atma özelliği 7,5 derece olan bir motorun tam tur atması için 48 adım atması gerekir. Maksimum tork elde etme ve bir adım atması için 4 pals gönderilmesi gerekir. Böylece motor dört pals sonunda 7,5 X 4 = 30 derece dönmüş olur. ISIS şemasında dikkat edilmesi gereken bir durum da mıknatısın dönme şeklinin anlatımıdır. Yani mıknatısın X-Y durumundan başlayıp Y'-X durumuna kadar olan dönmesi 7,5 X 4 = 30 derecelik bir açıya eşit olur. Bu işlem 12 defa tekrarlanırsa (360/30=12) motor bir tur atmış olur.