
Mobil APRS ve Tinytrak
Bu yazımda sizlere TINYTRAK ismli bir devre ile yapılan mobil APRS istasyonun nasıl oluşturulduğunu ve yaptığım devrede gözlemlediklerimi anlatmaya çalışacağım…
Merhaba değerli ANTRAK okuyucuları,
Bu yazımda sizlere TINYTRAK ismli bir devre ile yapılan mobil APRS istasyonun nasıl oluşturulduğunu ve yaptığım devrede gözlemlediklerimi anlatmaya çalışacağım. Öncelikle APRS sistemi hakkında kısa bilgi vereyim.
APRS (Automatic Position Reporting System) “Otomatik Pozisyon Belirleme Sistemi” olarak ifade edebiliriz. Genel olarak sabit ve hareketli istasyonlar olarak ikiye ayrılırlar. Sabit istasyonlar sadece önceden belirlenmiş olan koordinatları bildirir ve kısa mesaj haberleşmesi yaparlar. Hareketli istasyonlar ise belli aralıklarla sürekli değişen koordinat, yükseklik, hız v.b. bilgilerini gönderir. Eğer hareketli sistemde bilgisayar var ise kısa mesaj haberşmesi de yaparlar. Hareketli istasyonlarda durum bilgisi GPS (Global Position System) cihazı adı verilen küresel konumlandırma cihazlarından alınan verilerin bir telsiz arayüzü aracılığıyla havaya aktarılmasıyla oluşur. Bu hareketli istasyonları genel olarak üçe ayırabiliriz.
Birinci istasyon tipi PC – MODEM (veya modem yerine AGWPE programını kullanarak ses kartı) – TELSİZ – GPS konfigrasyonundan oluşur. Yazılım olarak UI-VIEW , WINAPRS, DOSAPRS, XASTIR v.b. programlar kullanılabilir.
İkinci istasyon tipi TELSİZ – GPS konfigrasyonu ( Bu tip istasyon için TNC ünitesi üzerinde olan telsiz cihazı gereklidir. Örnek olarak KENWOOD firmasının TMD-700, THD-7 modelleri gibi.)
Üçücü ve benim burada siz değerli okuyuculara anlatmaya çalışacağım TELSİZ – GPS ve TINYTRAK konfigrasyonundan oluşan, PIC kontrollü, ancak tek yönlü çalışan yani bulunduğu yerin bildirilmesini sağlayan ancak geri bilgi alamayan bir pozisyon aktarma sistemidir.
Bu sistemde kullandığım ana malzemeleri sizlere tanıtmaya çalışayım.
· GPS Modülü (üzerinde sony çipseti bulunan CDX2951GA-4 modeli)
· Bir adet Telsiz terminali (yaesu FT-290RII vhf-ssb portable radio)
· TINYTRAK cihazı ( cihaz dediğime bakmayın PIC kontrollü bir devre)
· 12 volt güç kaynağı
GPS
GPS olarak bu çalışmada SONY çipsetli CDX2951GA-4 isimli bir gps modülü kullandım. Bu gps’in çalışma voltajı 5 V.olup,nominal akımı ise 80 mA dir. GPS’te TTL ve RS-232 olmak üzere iki ayrı data çıkışı bulunmaktadır. Bu çalışmada RS-232 arayüzünü kullanmayı tercih ettim.
GPS’in uç bağlantıları aşağıdaki gibidir.
1) TTL – Tx Data
2) TTL – Rx Data
3) Vcc + 5 Volt
4) GND
5) RS-232 Tx Data
6) RS-232 Rx Data
Yukarıdaki GPS uç bağlantılarından Vcc +5 Volt, GND, RS-232 Tx Data uçları olmak üzere 3 adet bağlantıyı kullanmak yeterlidir. Ayrıca aşağıdaki bağlantıyı yaparak bilgisayardaki HYPER Terminali sayesinde NMEA 0183 verilerini ekrandan izlemekte mümkündür.
GPS RS-232
3 Vcc + 5 Volt
4 GND—————————5
5 RS232 TX Data ————–2

Yukarıdaki resimde GPS biriminin resimleri görünüyor.
Sony (CDX2951GA-4 cipsetli) GPS modülünü TINYTRAK sisteminin kalbi ve beyni olarak nitelendirebiliriz.GPS Koordinatları belirlemek için en az üç tane uydudan bilgi alıp, karmaşık formüller kullanarak konumu,hızı,yüksekliği vs.verileri belirler. Bu projede kullanıdığım GPS aynı anda 12 adet uydu ile irtibat sağlayıp haberleşebilme özelliğinede sahiptir. Bu GPS modülünü ben
www.denizelektronik.com adresinden 75 YTL + posta masrafı karşılığında temin ettim.
TELSİZ
Telsiz terminali olarak 2,5 Watt RF çıkış gücü olan yaesu marka FT-290 RII vhf-ssb mobil portatif telsiz cihazını kullandım.( tabiki FM modülasyonda) Çalışma Frekansımı simplex 144.800Mhz olarak belirledim. Güç kaynağı olarak 12 Volt enejiyi araçtaki çakmak çıkışından aldım.
Bu iş için 144.800 MHz frekansta çalışan herhangi bir FM telsiz kullanılabilir.

Yukarıdaki resimlerde benim projemde kullandığım mobil telsiz görülmekte.
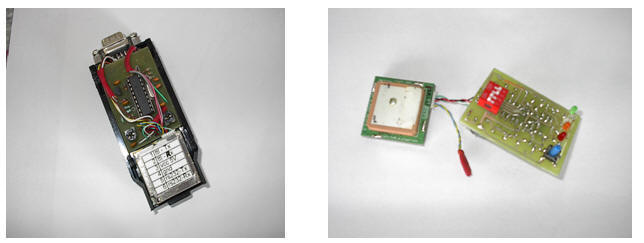
TINYTRAK
En önemli parça, sistemin beyni olarak ifade edebileceğim TINYTRAK (akıllı kara kutu). Bu kara kutu; PIC kontrollü olarak çalışan, GPS’den gelen NMEA 0183 verilerini alıp; gerekli enlem, boylam, yükseklik, gerçek saat ve yön bilgileri gibi verileri seçip, bu seçtiği datalarıda x25 packet haberleşme protokolunde telsizin mikrofon girişine irtibatlandırırken bu esnada telsizi otomatik olarak göndermeye geçiren bir devredir.


Yukarıdaki resimlerde TINYTRAK devresinin GPS ile birlikte monte edilmiş hali görünüyor
Bu devre RS-232 arayüzü sayesinde TINYTRAK configration adlı yazılımla konfigre edebilir. Çağrı işareti, beacon mesajı, beacon ikonu oluşturabilir, mobil istasyonunuzu RF üzerinden hangi şartlar altında yayın yapması gerektiğini ayarlayabilirsiniz. TINYTRAK ile ilgili tüm detayları ve Konfigrasyon programını ; http://www.byonics.com/tinytrak/tinytrak.zip linkinden indirebilirsiniz.
İndirilen sıkıştırılmış dosyada TINYTRAK ile ilgili (Versiyon 1) her türlü dokümanı yani, şema,baskılı devre, PIC için HEX kodu, ingilizce olarak Montaj ve kullanma kılavuzunun, resimleri bulabilirsiniz. TINYTRAK devresinin kendinize göre kişisel parametre ayarlarını yaparken gerekecek olan “Configuration” yazılımı da bu dosyalar arasında bulunmaktadır.

Yukarıda gorulen TINYTRAK parametreleri ayarlama programını kullanırken ;
· TINYTRAK’ı programlamak için RS232 kablosunu PC’ye takarken GPS/COM sw ile GPS’i
TINYTRAK’tan ayırmak gereklidir.Aksi halde çakışma yaşanabilir.
· Callsign yazan yere Çağrı İşareti yazılır.
· Path Yazan yere >> RELAY,WIDE2-2 yazılır.
· KeyUp Delay (TxD) yaklaşık 150ms Yapmak yeterli olacaktır.
· Transmit Every >> Pri:60sn Sec: 30sn olabilir.(Otomatik Beacon Zamanını ayarlamak için)
· Beacon Mesajına RF istasyonu kısa tanıtıcı bilgisi yazılır.
· Beacon Every >> Mesajın kaç beacondan sonra gönderilmesi gerektiğini ayarlanır.(5 olabilir)
· APRS / MIC-E >> mesage: in service Sembol : > olursa OTOMOBİL işareti çıkmaktadır. Bu alana yazılacak olan karakterlerin hangi Şekle karşı geldiği Internette APRS sayfalarında bulunm
aktadır. (Bunu ben deneme ile buldum)
· Check Version’ a basıldığında Hex kodunun Versiyonuna bakalabilinir.
· Read configration basıldığında TINYTRAK’ın içinde bulunan yazılıma bakılabilinir.
· Write configration basıldığında ayarlanan konfigrasyon bilgileri TINYTRAK’a yazılmış olur.
Devre üzerindeki B1 butonu manual olarak beacon göndermek için kullanılır. Butona her basıldığı anda GPS’ten alınan veriler TINYTRAK aracılığıyla telsiz üzerinden havaya aktarılır.
S1 ve S2 dpswich ise aracın hızına bağlı olarak otomatik olarak konum bilgisi aktarmak için kullanılır.
| Max.Speed | < 4 km/h | < 4 km/h | < 11 km/h | < 24 km/h | < 50 km/h | < 100 km/h | < 150 km/h |
| S1 = On | 25 dak. | 4 dak. | 120 sn. | 60 sn. | 30 sn. | 20 sn. | 10 sn. |
| S2 = Off | 30 dak. | 5 dak. | 160 sn. | 80 sn. | 40 sn. | 30 sn. | 20 sn. |
TINYTRAK ve GPS’i yerleştirdiğim kutu üzerinde kullanıcıyı bilgilendirmek için 4 adet led diyot bulunmaktadır. Bu sinyalizasyon ledlerinin anlamları:
· L1 led diyodu: Sisteme enerjinin geldiğini tinytrak’ın çalıştığını belirtir.
· L2 led diyodu: TinyTrak’ın telsizi göndermeye geçirerek dataların aktarıldığını belirtir.
· L3 led diyodu: Bu led diyot flash yapıyorsa GPS cihazının uydulara kilitlenmeye çalıştığını; Sürekli yanıyorsa da GPS ‘in uydulara kilitlendiğini ve gerekli dataları telsiz üzerinden TinyTrak’ın aktarmaya hazır olduğunu belirtir..
· L4 led diyodu: Havada RF trafiğinin oldunu, başka bir değişle telsiz terminalinin alma yaptığını belirtir.
Çalışmalarımdan birkaç tane resimde mevcut…

Ayrıca devrede GPS ve TINYTRAK’ı aynı kutunun içine entegre etmek için birkaç değişiklik yapmam gerektiğini görerek iki konumlu bir dipswichi gps ve rs232 ayırmak için kullandım. Öyleki TINYTRAK’ı konfigre etmek için PC’nin comportunu takınca GPS ile çakışma yapacağını düşündüm. GPS/COM SW. İle bu çakışmayı önlemiş oldum. Bilgisayarın comportundan TinyTrak’ı programlamak için aşağıdaki şemada gösterildiği gibi GPS bağlantısını ayırmak gerekiyor. Programlama işi bitince tekrar swci eski konumuna alarak GPS bağlantısının sağlanması gerekir.Bu arada programlama yaparken sisteme enerji verilmiş olması gerekir.TINYTRAK ile yaptığım mobil aprs sistemin devre şeması aşagıdaki şekilde gösterilmiştir.
Devrede kullandığım malzeme listesi:
U1:16F84A pic.
T1: 2N2222A NPN transistör
D1: 5V1 zener diyot
X1: 10 Mhz kristal
P1=P2: 10 Kohm Trimpot
S1=S2=S3=S4: dipswich
B1: beacon butonu
R1=R2=R3=R5=R6: 330 Ohm 0,025W. Direnç
R4=R7: 10 Kohm 0,025W Direnç
R8: 8K2 ..0,025W Direnç
R9: 3K9 ..0,025W Direnç
R10: 2 Kohm 0,025W Direnç
R11: 1 Kohm 0,025W Direnç
L1=L2=L3=L4 : 2,5mm Led Diyot
C1=C2=C3=C6 : 100 nF kapasite
C4=C5: 22 pF kapasite
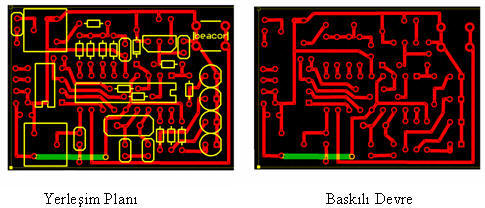
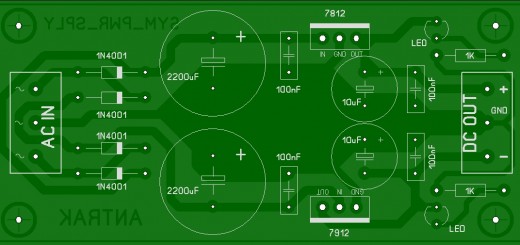
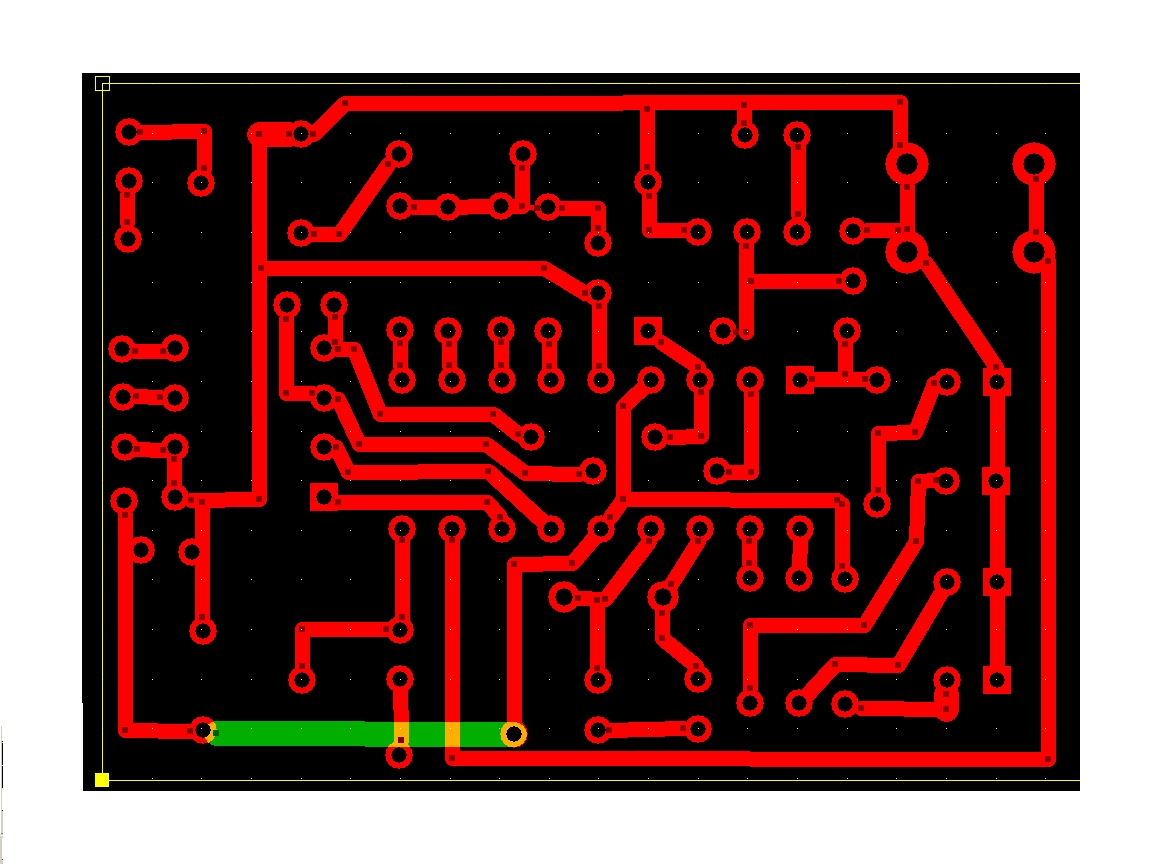
Devrenin PCB cizimlerini Express PCB programı kullanarak yaptım. Expres PCB yazılımını http://www.expresspcb.com/ExpressPCBHtm/Download.htm adresinden indirebilirsiniz. Aşağıda devremizin PCB cizimi ve yerleştirme planı verilmiştir.
HEX kodlarının yüklenmesi ve devrenin Kalibrasyonlarının yapılması
Sistemde kullanılan PİC’e öncelikle TINYTRAK Sitesinden indirilen hex kodunu yüklemek gerekiyor.Daha sonra TINYTRAK’a kişisel bilgilerinizi programlama işine geçmelisiniz. PİC’e HEX kodlarını yüklemek için piyasada yaklaşık 10 YTL civarına satılan ve comporttan çalışan JMD programerler veya 60 YTL civarında satılan USB programerler dan birisini kullanabilirsiniz.
Devre şemasında belirtilen 2 adet trimpot ile tinytrak’ın donanımsal kalibrasyonun yapılması gerekir.Bu kalibrasyon işlemi iki aşamada yapılır.
· 1nci aşamada P1 trimpotu ile telsizin mikrofon giriş seviyesi ayarlanır. Bu seviyeye telsiz cihazının dökümanlarından ulaşılabilir yada direk bağlanarak başka bir telsizden dinlenerek ayar yapılabilinir.Ben başka bir telsizden dinleyerek bu işi yaptım.
· 2nci aşamada ise P2 trimpotu ile TinyTrak’ın havada yayın varken gönderme yapıp yapmayacağı ayarlanır. Sistemde enerji varken trimpot cevirilerek L4 led diyodunun söndüğü yerde bırakırlır.Ve telsizin alma yaptığı zaman L4 led diyodunun yandığı gözlemlenir.
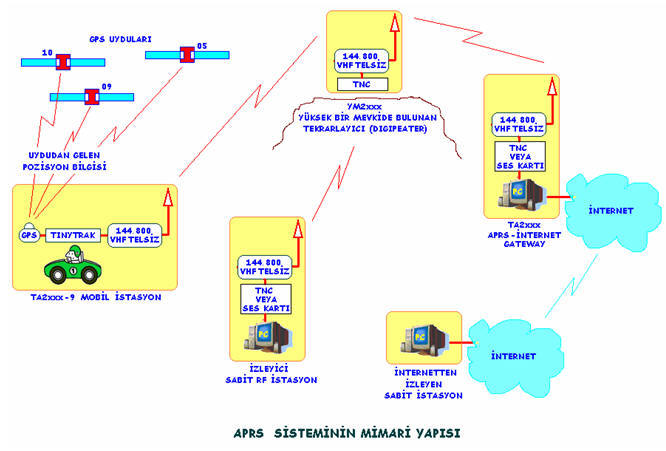
Yukarıda sistemin mimarisini genel olarak çizmeye çalıştım.Burada TINYTRAK ile telsiz bir hareketli istasyona takılarak çalışır.örneğin otomobile,motorbisiklete veya hareket halinde iken çantamızda durabilir.
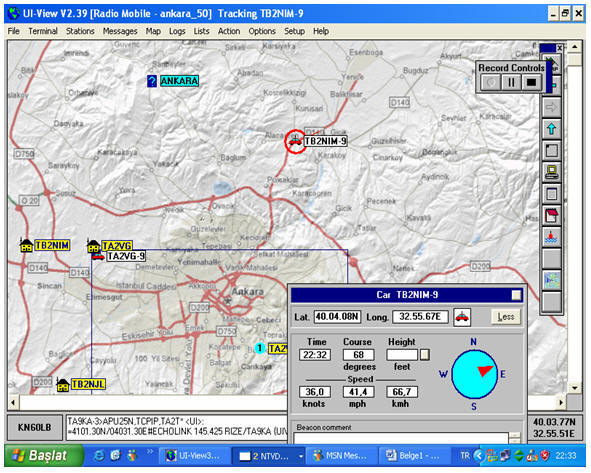
TA2xx-9 istasyonunda GPS’ten gelen verileri TINYTRAK alarak telsiz üzerinden havaya aktarıyor.Havaya aktarılan packet datalarını yakın bir RF istasyon alarak Ui-view programı sayesinde harita üzerinde istasyonun nerede olduğunu (koordinat olarak;yada görsel olarak), hızını, hareket yönünü, deniz seviyesinden ne kadar yüksekte olduğunu, iconunu, Beacon mesajını görebilir. Böylelikle istasyon hakkında bilgi edinilmiş ve de izlenmesi sağlanmış olur.
Yüksek bir mevkiide olan YM
2xxx cağrı adlı tekrarlayıcı özelliği olan bir sistem (buna DİGİPETER deniyor) havadaki packet datalarını alıp tekrar havaya aktarmak suretiylede TA2xx-9 istasyonun geniş alanda RF üzerinden izlenmesine olanak verir.
Ayrıca TA2x cağrı adlı istasyon RF-internet geçişlerini bir “gateway” olarak yaparak Mobil istasyonunun APRS verilerinin internete aktarılmasını sağlar. Böylece bütün dünyadan APRS programlarından birini kullananmakta olan tüm istasyonlar gerekli filitre ayarlarını yaparak izleme yaparlar.
Birkaç aydır testlere yardımcı olan TB2NIM-9 istasyonunun ekrandaki haritada oluşan izlenme resimlerini aşağıda görmektesiniz.…


Bu çalışma boyunca yardımlarını ve güzel önerilerini eksik etmeyen TA2T Tahir Beye ve tüm testler boyunca bize aktif yardım eden TB2NIM Alaaddin Beye ekran basında bu çalışmaya heyecanla destek veren TA2A Fethi Beye, TB2NJL Levent Beye ve tüm arkadaşlara sonsuz tesekkurler…Bol APRS’li günler dilerim..Devreyi kurmayı planlayan tüm arkadaşlara başarılar dilerim..
Selam ve saygılarımla…
Ferhat BOZOKLU
TA2VG
ferhatbozoklu@hotmail.com
Ferhatbozoklu@gmail.com








{kind=link}
{kind=link}
{kind=link}