Quadrotor – Uçan PIC – 3
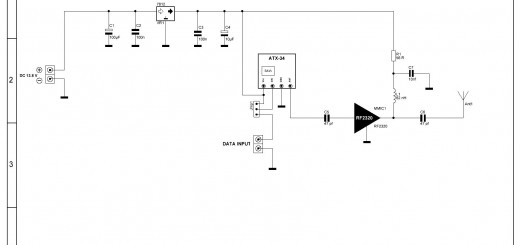
Uçan Pic’in daha önceki iki bölümünde Platformun genel yapısını ve stabil ucmayi saglayan PID uçuş mekaniğini anlatmıştım. Bu bölümde ise Uçuş platformunun devresine detaylı bir şekilde göz atacağız. Değerli Antrak Gazetesi okurları,geçen ay...